

1. Introduction to LADDER III software
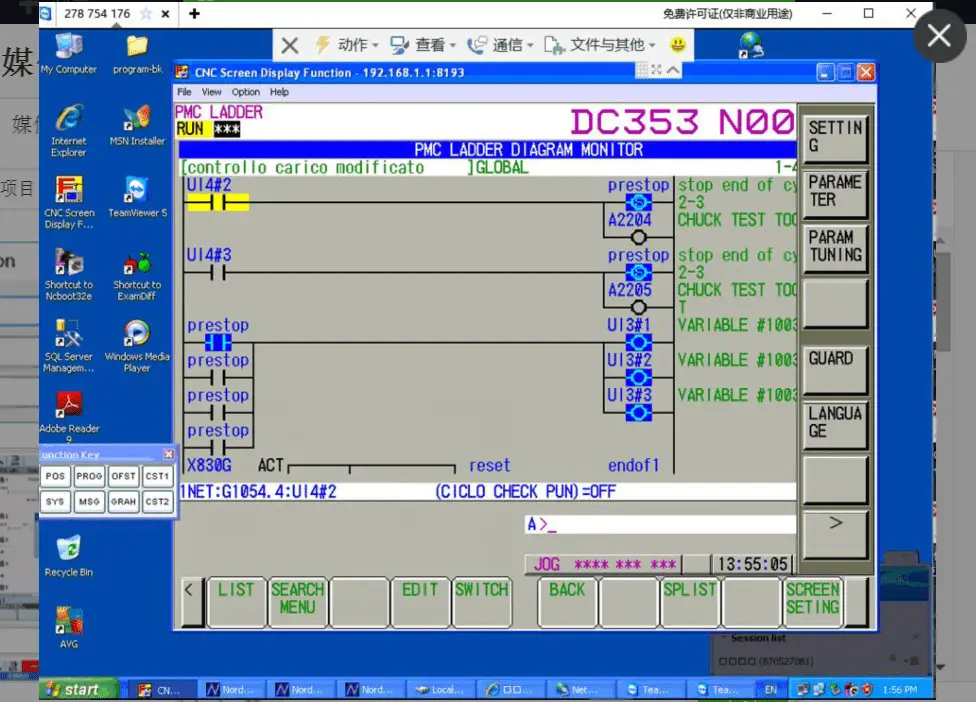
FANUC LADDER III software is a PMC programming system software dedicated to FANUC CNC systems. It is a programming system for the development of FANUC PMC sequence programs running in a PC (personal computer) environment.
Machine tool plants (MTB) usually use FANUC LADDER-III software to implement functions such as editing, display, input/output, monitoring, and operation of PMC programs, especially the preparation and debugging of PMC programs for new machine tools. The ladder program edited through this platform according to the specific control requirements of the machine tool is the PMC user program. A skillful woman cannot make a meal without rice. Software is a necessary tool for mastering skills. Software is a process of upgrading. The following introduces the PC installation steps of FANUC LADDER-III version 8.9 and the upgrade content of this software compared to the previous software.
2. LADDER III software installation steps
1. Unzip the compressed package
Note: This version of the software is different from version 8.0 and can be installed directly. After decompression, the authorization code is in the installation package folder.
![图片[1]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714175909974.png)
2. Open the FANUC LADDER III 9.5 installation package folder and click FL3AutoRun to install it.
3. Click the Start Installer button
![图片[2]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176344956.png)
The installation process is automatic. If your computer already has an earlier version, the installation software will automatically uninstall the old version.
![图片[3]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176412781.png)
Follow the installation software prompts and click OK:
![图片[4]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176479231.png)
After the uninstallation is complete, the installation program will automatically start:
![图片[5]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176545022.png)
Enter the authorization code. The authorization code is in the folder of the installation package.
![图片[6]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176630377.png)
![图片[7]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176672276.png)
Select the installation path, usually the default is C drive.
![图片[8]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176731448.png)
Then take the next step and wait for the installation to be successful.
After the installation is complete, launch the program through the start menu to see that we have successfully installed and upgraded.
![图片[9]-FANUC LADDER III V9.5 Software Installation And Usage Tutorial - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/04/1714176802794.png)












暂无评论内容