
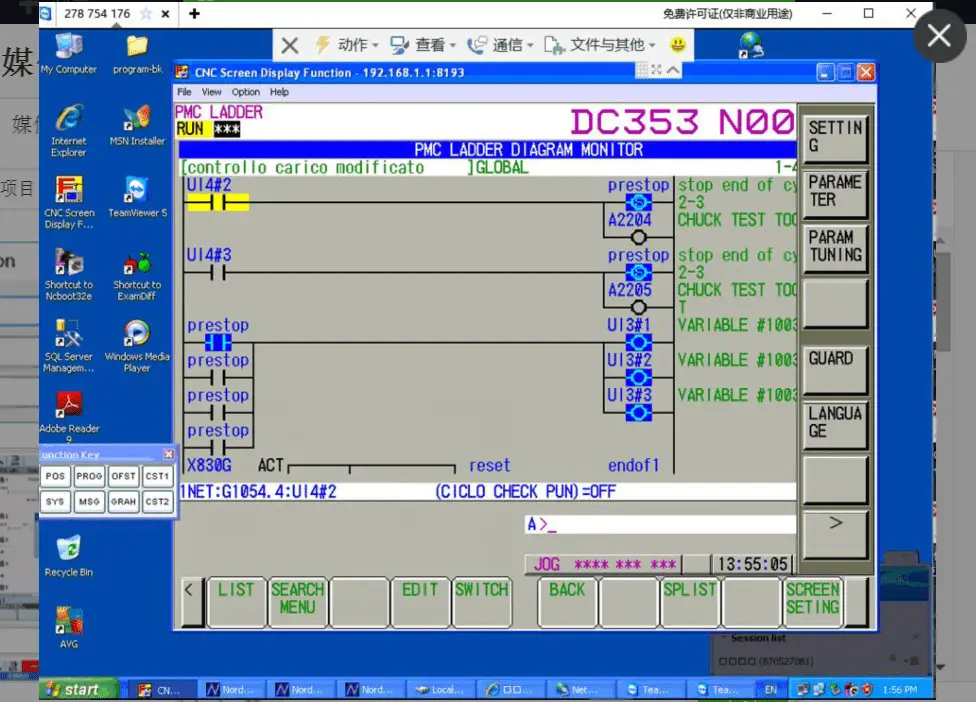
The FANUC NC Guide FANUC PICTURE Function operation manual is a learning manual. Through this manual, we can better use the NC GUIDE simulation software for secondary development of the learning system. You can download and learn through the FANUC CNC website.The following is the table of contents of this book
Regarding the introduction of NC GUIDE PRO software, you can view it through the web page FANUC NC Guide/NC GuidePro software
![图片[1]-FANUC NC Guide FANUC PICTURE Function - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/05/1715343494571.png)
一、download link
© 版权声明
The copyright of the article belongs to the author. Please do not reprint it without permission.
THE END













暂无评论内容