
SV417 servo parameter setting error, solution and steps are as follows:
Solution:
(1) Diagnosis data No.203 # 4=0: The parameters detected by CNC are illegal. Details confirm diagnostic data No.280.
When the parameters detected by CNC are illegal, confirm the diagnostic data No.280 and the following parameter settings.
Parameter No. 2020: Motor model
Parameter No. 2022: Motor rotation direction
Parameter No. 2023: Speed feedback pulse count
Parameter No. 2024: Number of position feedback pulses
Parameter No. 1023: Servo axis number
Parameter No. 2084: Ratio of flexible feed gears
Parameter No. 2085: Ratio of flexible feed gears
Parameter No. 2211 # 6: Using a 2-winding motor
Parameter No. 2211 # 7: Using a 4-winding motor
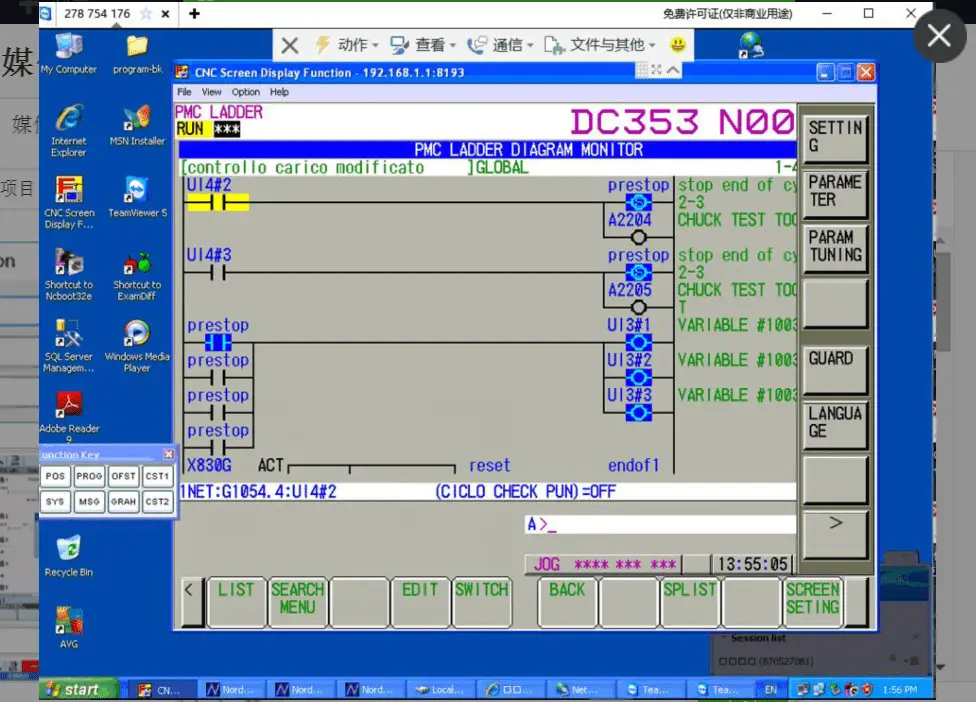
(2) Diagnosis data No.203 # 4=1: The parameters detected by the servo are illegal. Details confirm diagnostic data No.352.
The detailed content of the alarm is data with 2-5 digits, which consists of the following:
![图片[1]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/1717288727779.png)
The first 4 digits indicate the location where the alarm occurred.
The part where the alarm occurs basically displays the last three digits of the parameter number’s four digits. (Regarding the main reason being composed of multiple parameters, some may not match the parameter number)
When displayed on the diagnostic screen, 0 of the upper digit is not displayed.
Last 1 digit: The number indicating the main cause of the alarm occurrence.
The correspondence between the display number and its meaning is as follows: (When it is a bit type parameter, in some cases it represents the bit position.)
2: The set parameters are invalid. The corresponding function is not working.
3: The set value of the parameter exceeds the set range. Or no parameters are set.
4-9: Overflow occurs in internal calculations.
![图片[2]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/01.png)
![图片[3]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/02.png)
![图片[4]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/03.png)
![图片[5]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/04.png)
![图片[6]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/05.png)
![图片[7]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/06.png)
![图片[8]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/07.png)
![图片[9]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/08.png)
![图片[10]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/09.png)
![图片[11]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/10.png)
![图片[12]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/11.png)
![图片[13]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/12.png)
![图片[14]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/13.png)
![图片[15]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/14.png)
![图片[16]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/15.png)
![图片[17]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/16.png)
![图片[18]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/17.png)
![图片[19]-Steps To Resolve Illegal FANUC SV417 Servo Parameters - FANUC CNC-FANUC CNC](https://www.share5.cn/wp-content/uploads/2024/06/18.png)










暂无评论内容